Deformable Shape Matching
Abstract
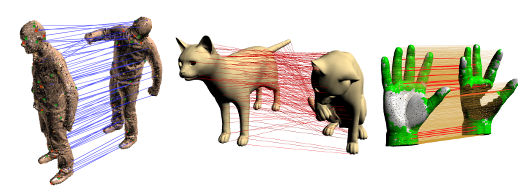
Anpassung deformierbarer Formen ist zu einem wichtigen Baustein in der akademischen Welt sowie in der Industrie geworden. Gegeben zwei dreidimensionale Formen A und B, suchen wir nach einer Verformungsfunktion f, die die Deformation von A auf B abbildet. Die Funktion f wird durch eine Menge von korrespondierenden Punktepaaren diskretisiert. Leider sind die Berechnungskosten für eine Brute-Force-Suche dieser Korrespondenzen exponentiell. Um zusätzlich von einem praktischen Nutzen zu sein, muss der Suchalgorithmus in der Lage sein, mit Daten, die direkt aus 3D-Scanner kommen, umzugehen. Bedauerlicherweise leiden diese Daten unter Akquisitionsproblemen wie Rauschen, Löcher sowie fehlender Topologieinformation. In dieser Dissertation werden neue Lösungen für das Problem der Formanpassung präsentiert. Als erstes wird ein Algorithmus gezeigt, der die Korrespondenzen mittels einer randomisierten Suchstrategie schätzt. Zusätzlich wird anhand eines automatisch berechneten Schätzplanes die Geschwindigkeit der Suchstrategie verbessert. Danach wird ein Verfahren gezeigt, dass die Anpassung mehrerer Formen gleichzeitig bewerkstelligen kann. Diese Methode ermöglicht es, die Bewegung, sowie die eigentliche Struktur des Objektes aus verrauschten Daten, die mittels dynamischer 3D-Scanner aufgenommen wurden, zu rekonstruieren. Darauffolgend wird das Problem der Formanpassung aus einer anderen Perspektive betrachtet und als Markov-Netzwerk (MRF) reformuliert. Dieses ermöglicht es, die Formen auch stückweise aufeinander abzubilden. Die eigentliche Lösung wird mittels Belief Propagation berechnet. Schließlich wird ein Ansatz gezeigt, der die Speicher-Zeit-Komplexität von Belief Propagation für ein breites Spektrum von Computer-Vision Problemen erheblich reduziert.
 Read Thesis
- (~54MB) 1227 mal angeklickt
Read Thesis
- (~54MB) 1227 mal angeklickt
A. Tevs, "Deformable Shape Matching" , Department of Computer Science, Saarland University, Germany, pages 1-201, 2011.